beyondNoReturn.m#
This is the Matlab version of a routine which is typically run as compiled C code. The idea is based on the idea of the region of no return, which is outlined in section 3.2 of [Gibbs et al., 2024]. This subroutine identifies when a steepest descent contour has reached such a region in the complex plane, after which it can never leave.
[value, vIndex] = beyondNoReturn(h,valleys,phaseCoeffs,rStar)
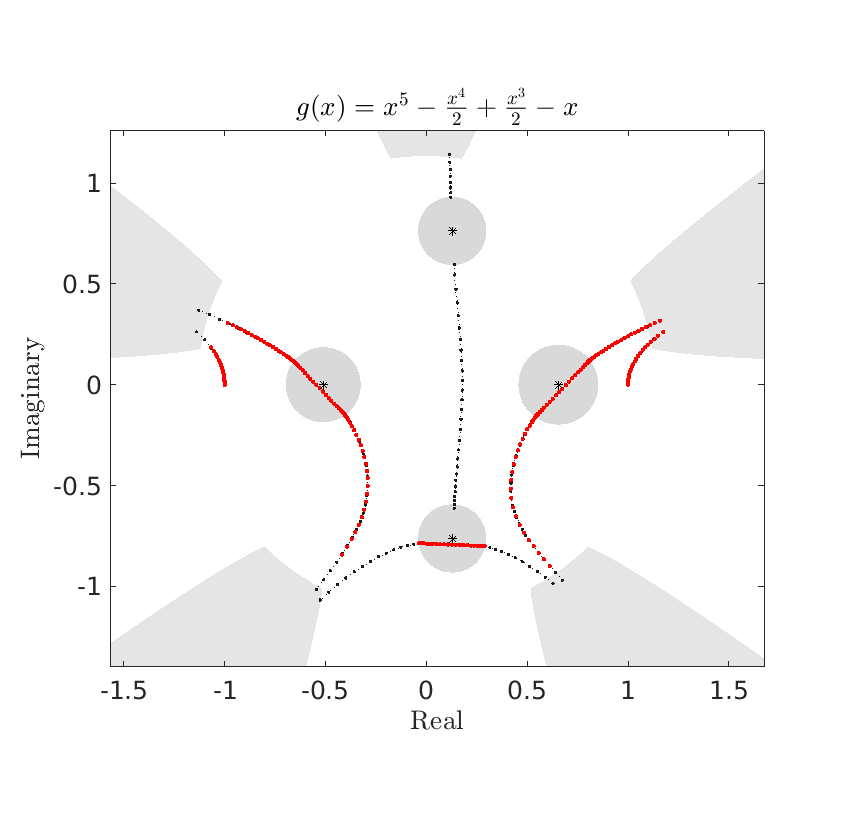
The no return regions can be seen around the edges of the following image:
Inputs#
h: The steepest point that has been traced along the steepest descent pathvalleys: Valleys of the polynomial phase function \(g\)phaseCoeffs: Coefficients of the polynomial phase function \(g\).rStar: A constant dependent on \(g\), stored to save repeated computations. This is the solution of a polynomial equation, details are given in section 2.4 of [Gibbs et al., 2024].
Outputs#
value:trueif inside the region of no return,falseotherwise.vIndex: The index of the limiting valley of the particular segment of the no return region. This will be blank ifvalue = false, i.e. not in the region of no return.